Machine Learning in Materials Processing & Characterization
Unit 2: Physics of Data Formation




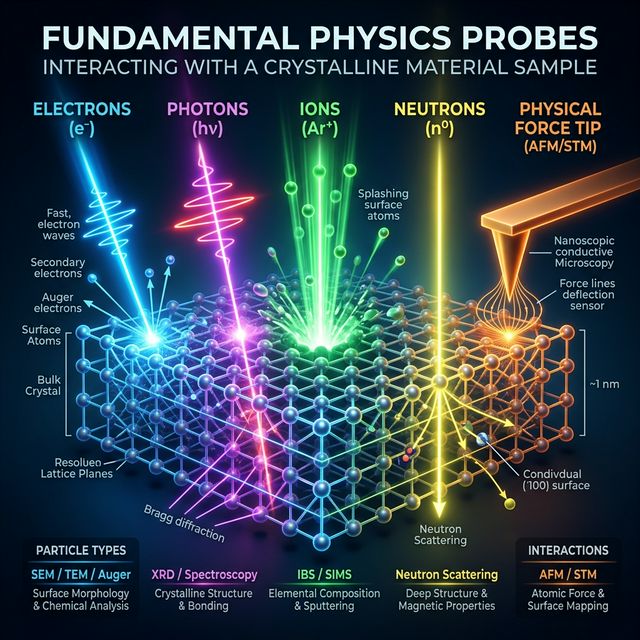
02. The Five Fundamental Probes
To understand data, we first ask: What is probing the sample?
- Electrons: Charged, low mass. High spatial resolution.
- Photons: Massless, uncharged. Penetrating, probes bonds & crystals.
- Ions: Massive, charged. Huge momentum transfer (sputtering).
- Neutrons: Massive, uncharged. Deep nuclear penetration.
- Physical Forces: Van der Waals, Pauli repulsion, tunneling (macroscopic/nanoscale probes).
- The choice of probe dictates the physical interaction, which determines the resulting data format (2D projection vs 3D volume, surface vs bulk).
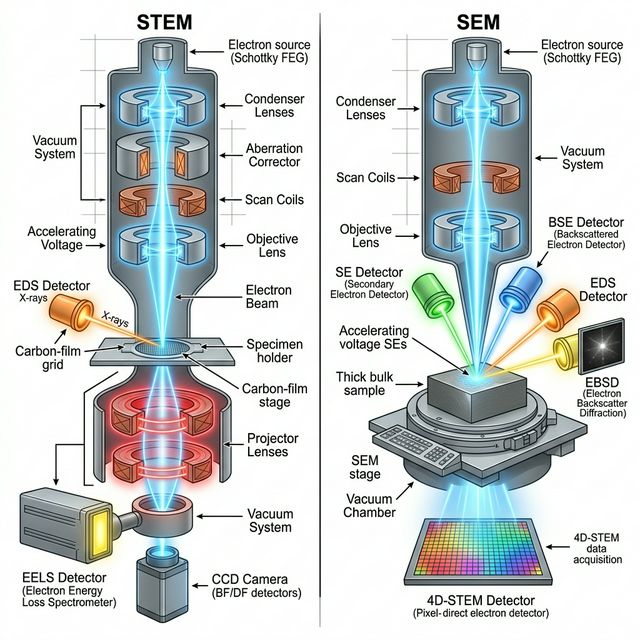
03. Electron Interactions
Physics of the Probe:
- Electrons are negatively charged and have low mass.
- Strong Coulomb interactions with both nucleus and electron cloud.
- High interaction cross-section = low penetration depth (surface sensitive).
- Easily focused using magnetic lenses to sub-Ångström spot sizes.
Information & Data Format:
- Elastic Scattering (Diffraction): Provides crystal structure (e.g., SAED).
- Inelastic Scattering (Energy Loss): Yields chemical/bonding information (EELS/EDXS).
- Data: High-resolution 2D real-space images (SEM/STEM), 2D reciprocal-space diffractions, or 1D spectra.
04. Photon Interactions (Vis & X-Ray)
Physics of the Probe:
- Electromagnetic waves (\(E=h\nu\)). They interact primarily with the electron cloud.
- Visible/IR: Low energy. Probes molecular bonds, vibrations, and bandgaps (Raman, FTIR).
- X-rays: High energy. Probes core-level electrons and long-range crystal periodicity (XRD, XPS). Highly penetrating.
Information & Data Format:
- Transverse wave-nature means no magnetic lenses \(\to\) harder to form sub-nm real-space probes compared to electrons.
- Excels at yielding bulk, macroscopic averages.
- Data: Often collected as 1D spectra (Intensity vs. Energy/Wavenumber/\(2\theta\)) or 2D diffraction spots.
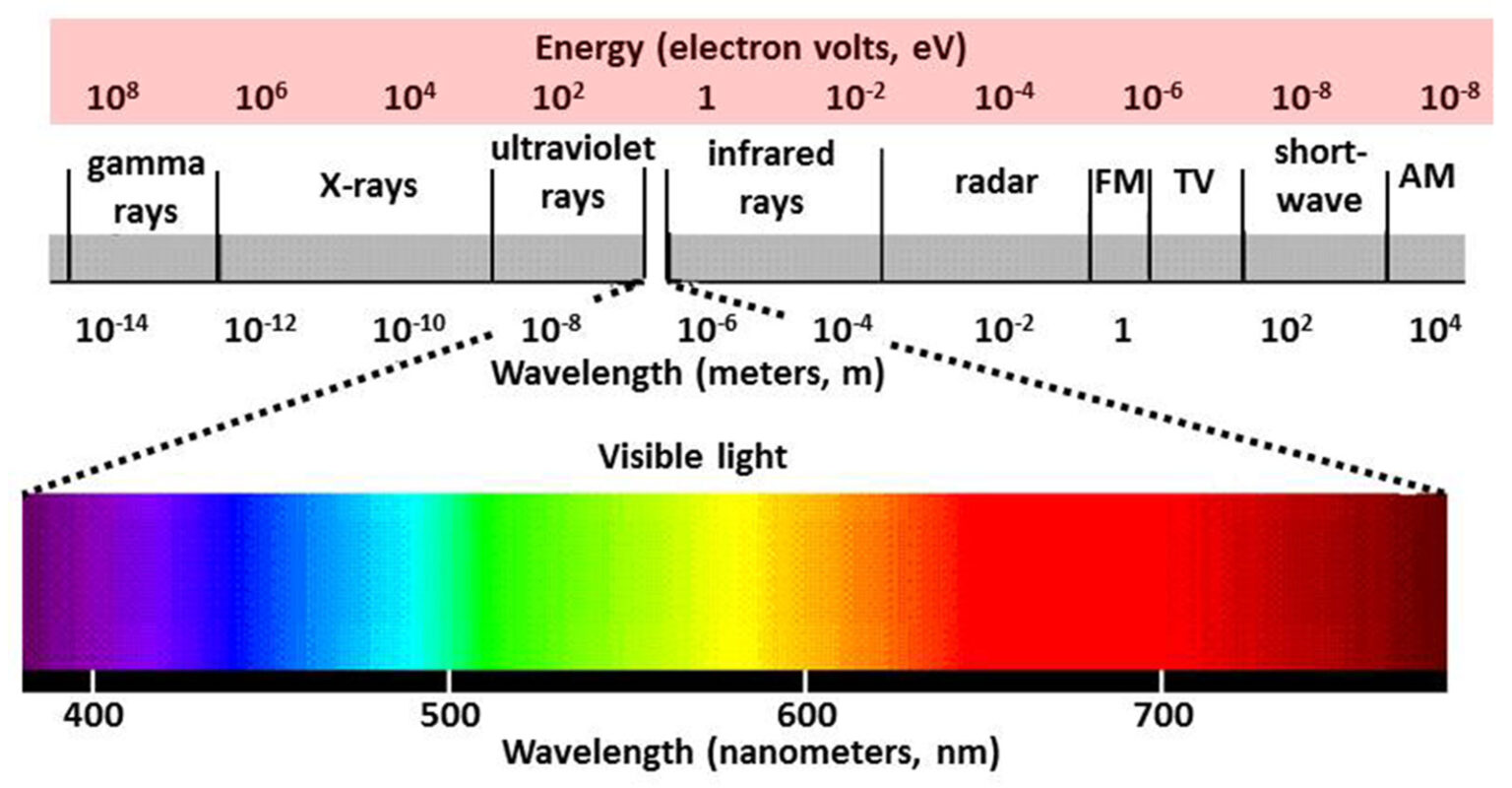
Electromagnetic spectrum
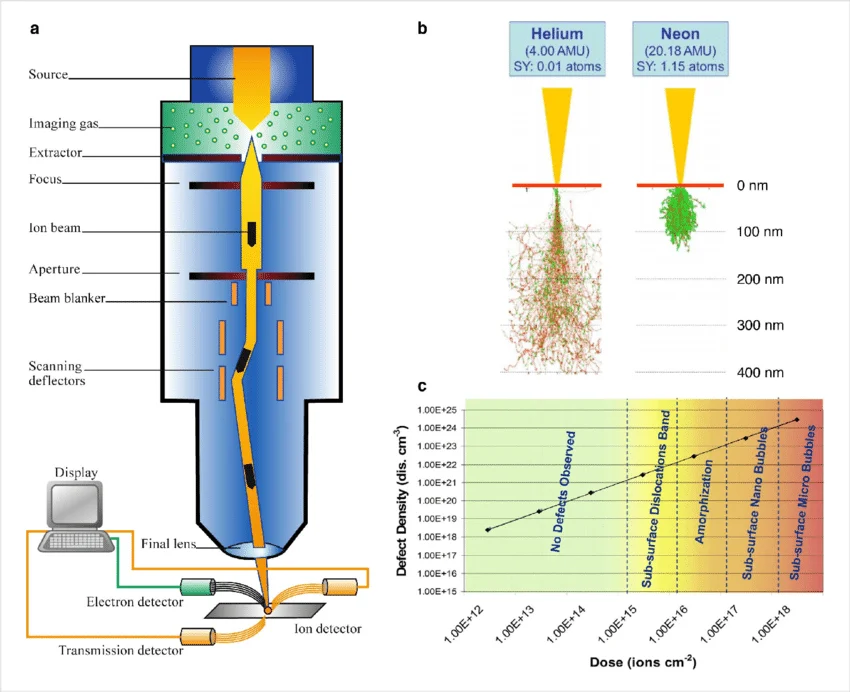
05. Massive Particles: Ions & Neutrons
Ions:
- Massive, charged (e.g., Ga\(^+\), He\(^+\)).
- Transfer huge momentum (nuclear stopping).
- Used for milling/sputtering (FIB) and direct mass identification via Time-of-Flight (Atom Probe Tomography).
- Data: Focuses on direct 3D atomic reconstructions mapping isotopic mass to \((x,y,z)\) coordinates.
Neutrons:
- Massive, neutral.
- Interact only with the nucleus (strong force) and magnetic spin.
- Extremely deep penetration (can probe inside bulk steel parts).
- Data: Isotope-specific scattering (can easily distinguish Hydrogen from Deuterium). Magnetic structure diffraction.
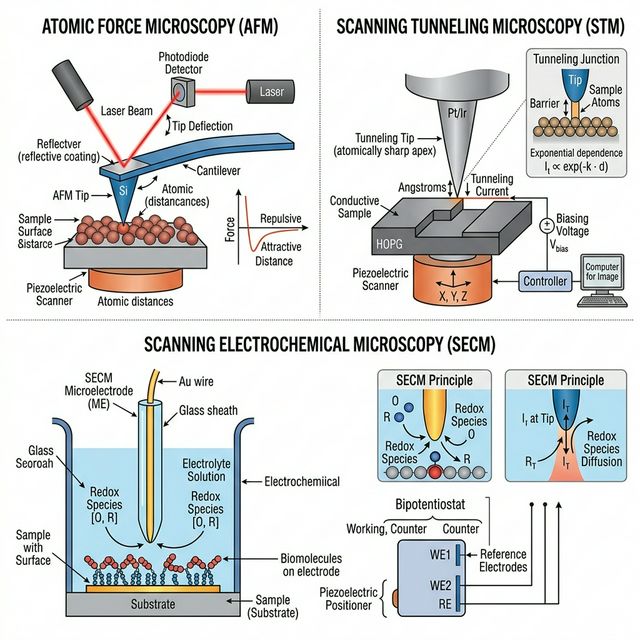
06. Physical Probes & Forces
Physics of the Probe:
- A physical, nanoscopic tip interacts directly with the sample surface.
- Relies on fundamental forces: Van der Waals, electrostatic, or Pauli exclusion (repulsion).
- In Scanning Tunneling Microscopy (STM), it measures quantum electron tunneling probability.
Information & Data Format:
- Atomic Force Microscopy (AFM): Measures cantilever deflection via laser tracking.
- Yields true 3D spatial height maps (topography) of the surface, rather than a 2D projection.
- Data: 2D Topographic maps \(Z(X,Y)\), or Force-Distance curves measuring mechanical stiffness/adhesion.
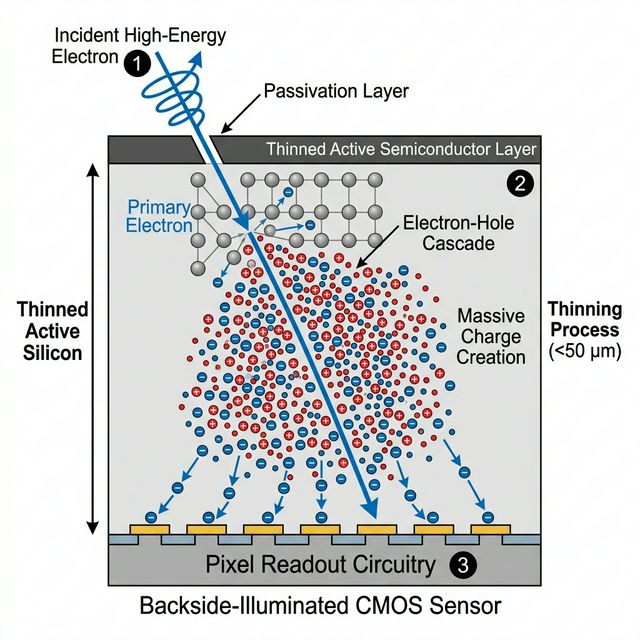
10. Example: Direct Detectors
- Targets: X-rays and high-energy electrons (e.g., Cryo-EM).
- Direct Process: Incident particle enters a thinned semiconductor layer directly.
- Physics: One incident high-energy particle generates a massive electron-hole cascade.
- Key Advantages:
- No scintillator intermediate \(\to\) no optical scattering.
- Extremely sharp Point Spread Function (PSF).
- High SNR allows precise single-particle counting with near-zero noise.