Mathematical Foundations of AI & ML
Unit 12: Uncertainty in Predictions




Why point predictions are not enough
- A model predicting 450 MPa tensile strength is useless without knowing if the uncertainty is \(\pm 5\) or \(\pm 100\) MPa.
- In safety-critical applications, the uncertainty drives the decision, not the prediction.
- Overconfident models are more dangerous than inaccurate ones.
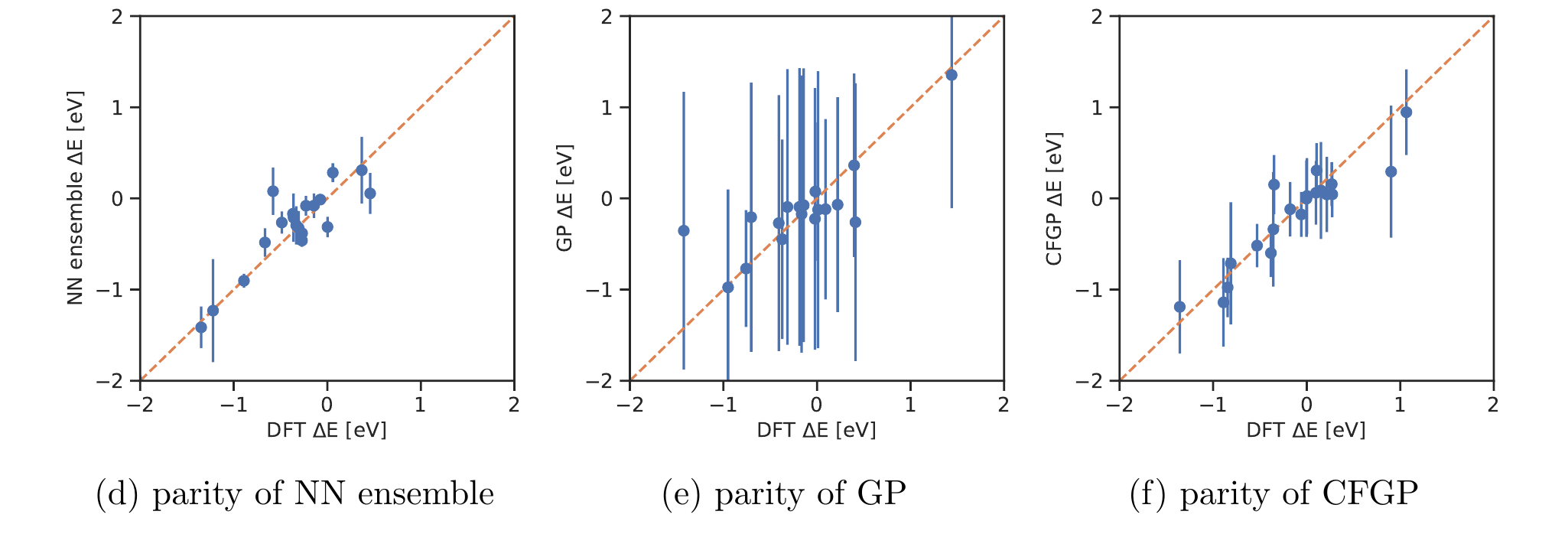
Same predictions, different error bars: an overconfident NN ensemble (left, bars too small — points miss the diagonal), an underconfident GP (middle, bars too large), and a well-calibrated model (right). The point estimates look similar; only the honesty of the error bar differs. Source: (Tran et al. 2020) Fig. 4 (parity plots, formation-energy \(\Delta E\)).
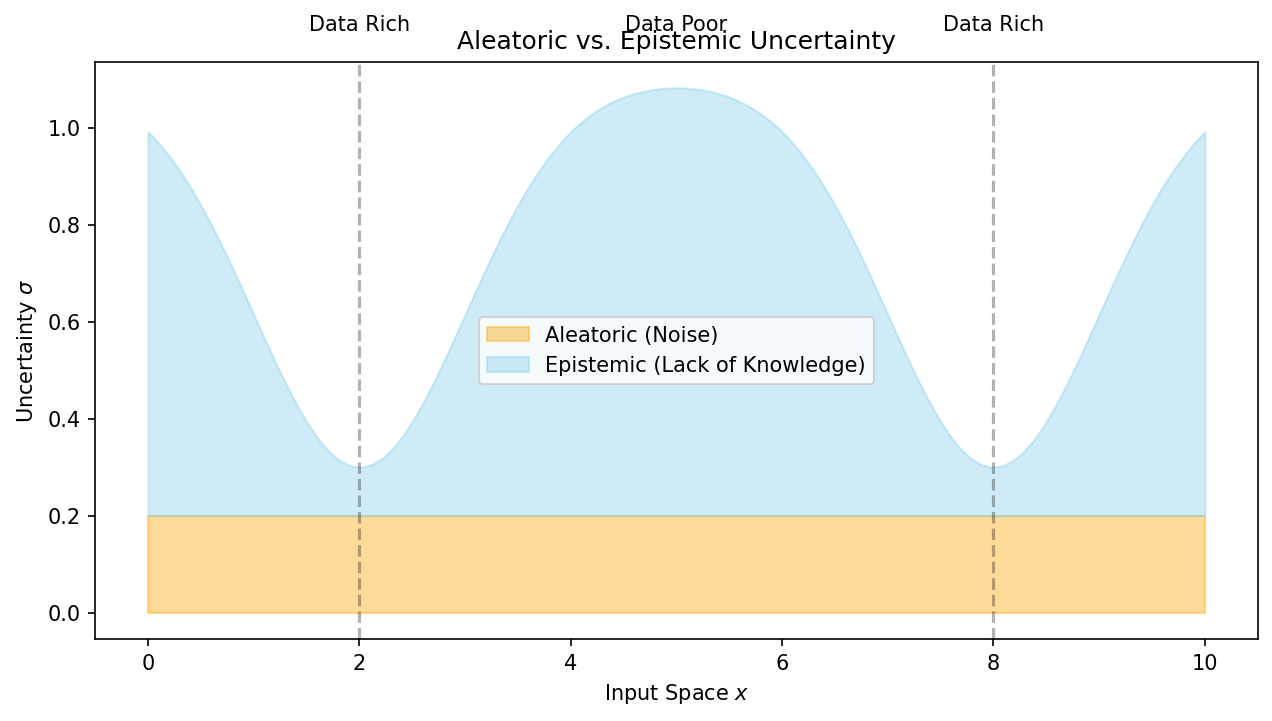
Recall: aleatory vs epistemic uncertainty (Unit 7)
- Aleatory: inherent noise in the data-generating process — irreducible.
- Epistemic: uncertainty from limited data or model capacity — reducible.
- A complete UQ framework must quantify and distinguish both types.
- As training data grows, epistemic uncertainty should shrink; aleatory uncertainty should not.
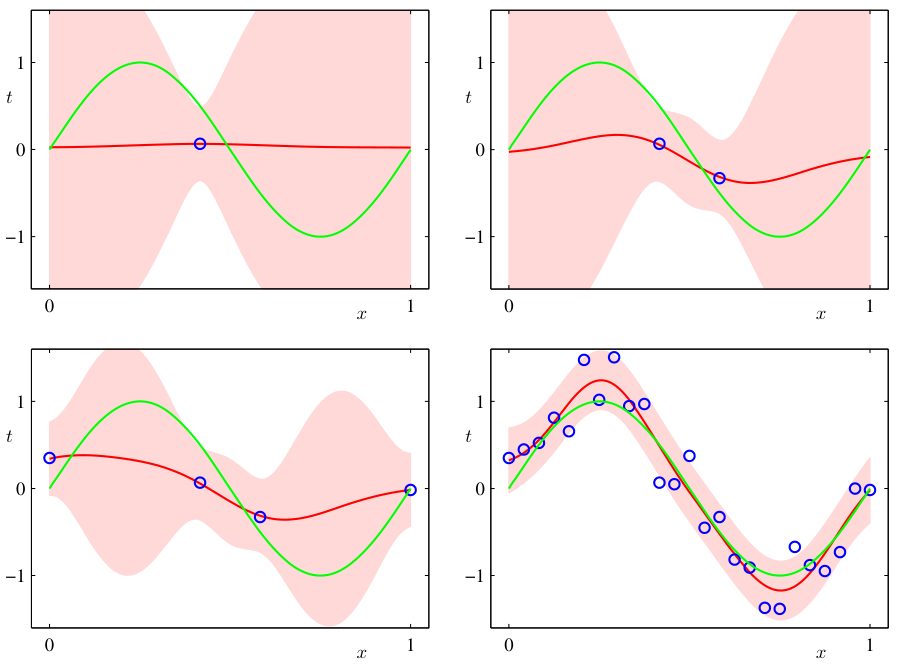
The Bayesian predictive distribution
- Instead of predicting with a single \(\hat{\theta}\), integrate over all plausible \(\theta\):
\[ p(\mathbf{y}^* | \mathbf{x}^*, \mathcal{D}) = \int p(\mathbf{y}^* | \mathbf{x}^*, \theta) \, p(\theta | \mathcal{D}) \, d\theta \]
- This accounts for parameter uncertainty — the full posterior contributes to the prediction.
- The result is a distribution over predictions, not a single point.
- As data increases (1 → 2 → 20 obs.), the predictive band narrows.
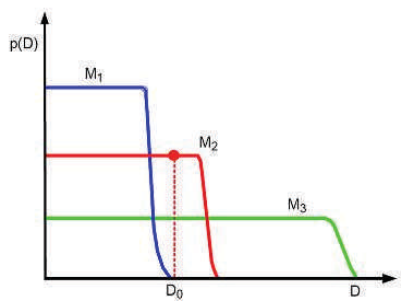
Evidence as automatic Occam’s razor
- Simple model \(\mathcal{M}_1\): prior concentrated on few parameter values → high evidence if data is simple.
- Complex model \(\mathcal{M}_3\): prior spread thinly over many parameters → lower evidence unless data demands complexity.
- Just-right model \(\mathcal{M}_2\): highest evidence at observed \(\mathcal{D}_0\).
- The evidence automatically penalizes unnecessary complexity — no need for explicit regularization.
Model comparison via evidence
- Bayes factor: \(\frac{p(\mathcal{M}_1 | \mathcal{D})}{p(\mathcal{M}_2 | \mathcal{D})} = \frac{p(\mathcal{D} | \mathcal{M}_1)}{p(\mathcal{D} | \mathcal{M}_2)} \cdot \frac{p(\mathcal{M}_1)}{p(\mathcal{M}_2)}\).
- With equal model priors: the model with higher evidence is preferred.
- Unlike cross-validation, this uses all the data for both fitting and evaluation.
- Evidence selects \(d{=}1\) (linear) over \(d{=}2,3\) for small \(N{=}5\); at \(N{=}30\) it correctly selects \(d{=}2\).
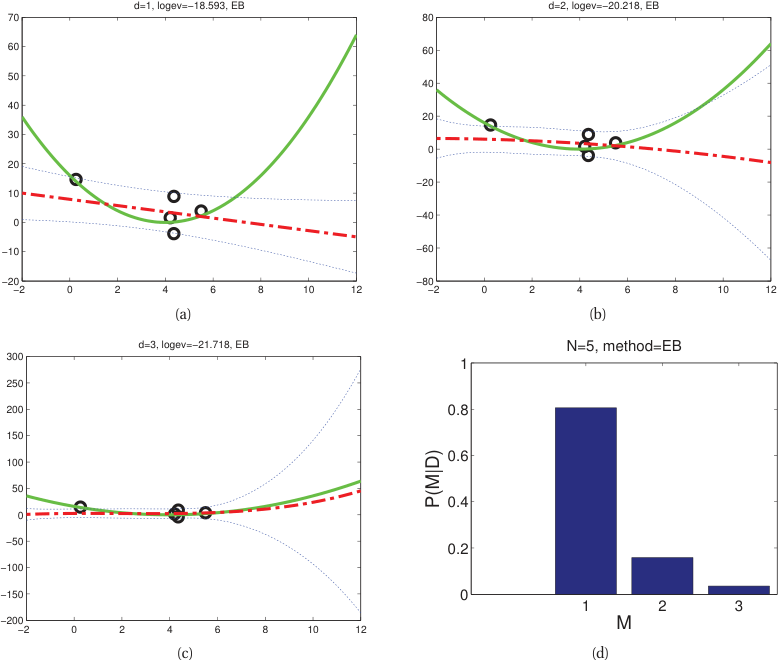
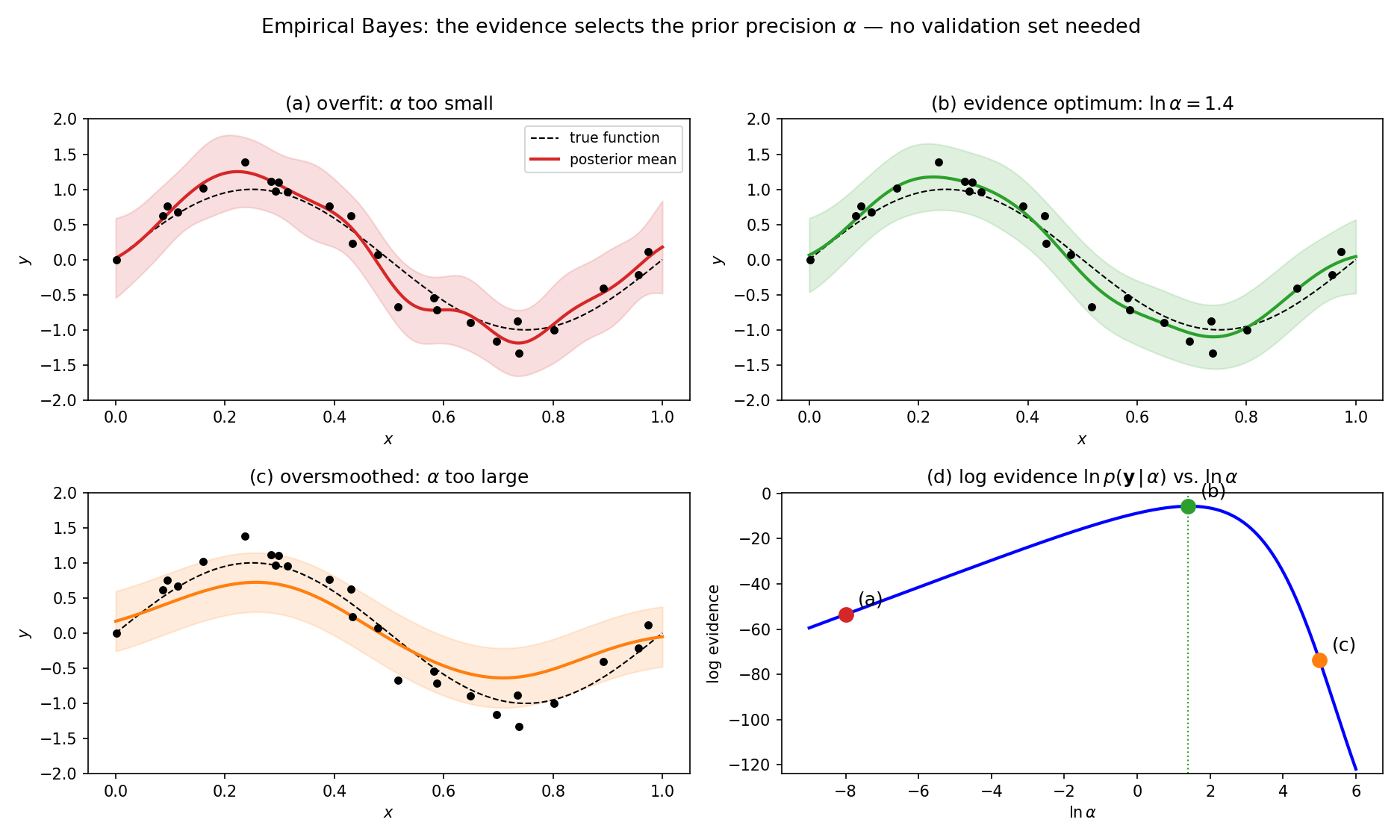
Empirical Bayes
- Instead of fixing hyperparameters (prior variance, noise level), optimize them by maximizing the evidence.
- \(\hat{\alpha}, \hat{\sigma}^2 = \arg\max_{\alpha, \sigma^2} \log p(\mathcal{D} | \alpha, \sigma^2)\).
- This is a principled alternative to cross-validation for hyperparameter selection.
- Also called type-II maximum likelihood.
- Example →: RBF-basis regression, prior \(\mathbf{w} \sim \mathcal{N}(\mathbf{0}, \alpha^{-1}\mathbf{I})\). The evidence curve (d) picks the \(\alpha\) of fit (b) — using all the data, no validation set.
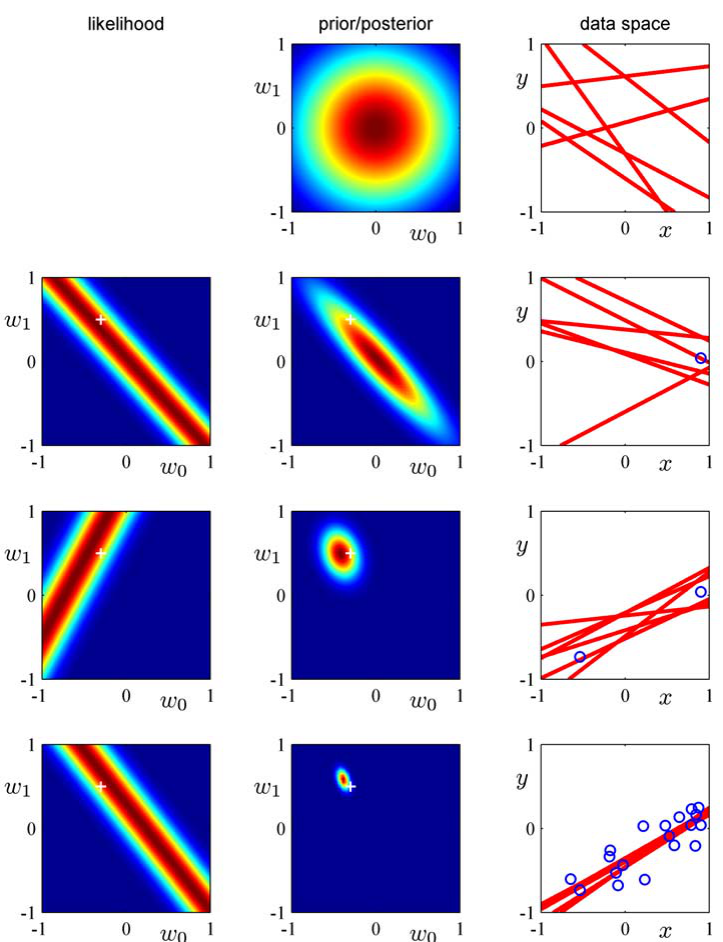
From weight space to function space
- Any linear-in-parameters model with a Gaussian prior on the weights is a GP:
\[ f(\mathbf{x}) = \mathbf{w}^\top \boldsymbol{\phi}(\mathbf{x}), \quad \mathbf{w} \sim \mathcal{N}(\mathbf{u}, \mathbf{S}) \;\Rightarrow\; f \sim \mathcal{GP}(m, k) \]
\[ m(\mathbf{x}) = \mathbf{u}^\top \boldsymbol{\phi}(\mathbf{x}), \qquad k(\mathbf{x}, \mathbf{x}') = \boldsymbol{\phi}(\mathbf{x})^\top \mathbf{S} \, \boldsymbol{\phi}(\mathbf{x}') \]
- Example: \(f(x) = w_0 + w_1 x\) with \(w_0, w_1 \sim \mathcal{N}(0,1)\) gives \(m(x) = 0\), \(k(x,x') = 1 + xx'\).
- Bayesian linear regression (Unit’s prerequisite!) is a GP with the linear kernel.
GP prior: sampling functions
- Before seeing data, sample functions from the prior: \(f \sim \mathcal{GP}(0, k)\).
- With RBF kernel: smooth, random functions with length scale \(\ell\) and amplitude \(\sigma_f\).
- Different kernel parameters produce visually different function families.
- The prior encodes our beliefs about what functions are plausible.

GP posterior: conditioning on data
- Observe \(\mathcal{D} = \{(\mathbf{x}_i, y_i)\}_{i=1}^N\) with \(y_i = f(\mathbf{x}_i) + \epsilon\), \(\epsilon \sim \mathcal{N}(0, \sigma_n^2)\).
- The posterior \(f | \mathcal{D}\) is also a GP with updated mean and covariance.
- The posterior passes through (or near) the training points.
- Away from data, the posterior reverts to the prior.

GP uncertainty bands
- Plot \(\boldsymbol{\mu}(\mathbf{x}) \pm 2\sigma(\mathbf{x})\): the 95% credible band.
- Bands are narrow near observed data (confident predictions).
- Bands widen away from data (uncertain predictions).
- This is honest uncertainty — the GP admits what it does not know.

GP hyperparameter learning
- Optimize kernel hyperparameters \(\ell, \sigma_f, \sigma_n\) by maximizing the log marginal likelihood:
\[ \log p(\mathbf{y} | \mathbf{X}) = -\frac{1}{2}\mathbf{y}^\top(\mathbf{K} + \sigma_n^2 \mathbf{I})^{-1}\mathbf{y} - \frac{1}{2}\log|\mathbf{K} + \sigma_n^2 \mathbf{I}| - \frac{N}{2}\log 2\pi \]
- Three terms: data fit, complexity penalty, normalization.
- Gradient-based optimization (L-BFGS is common).
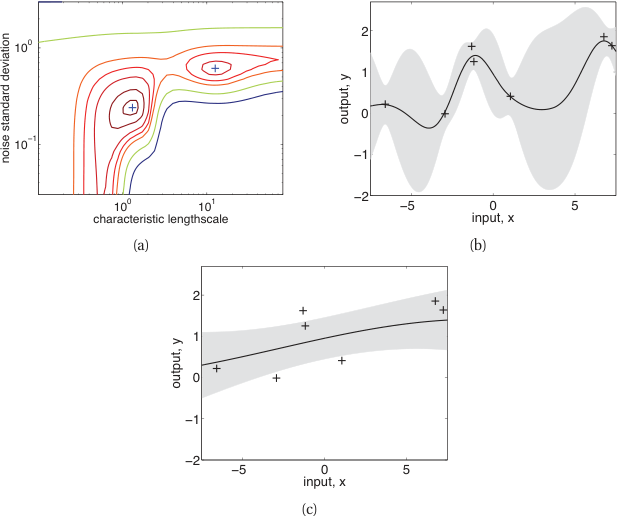
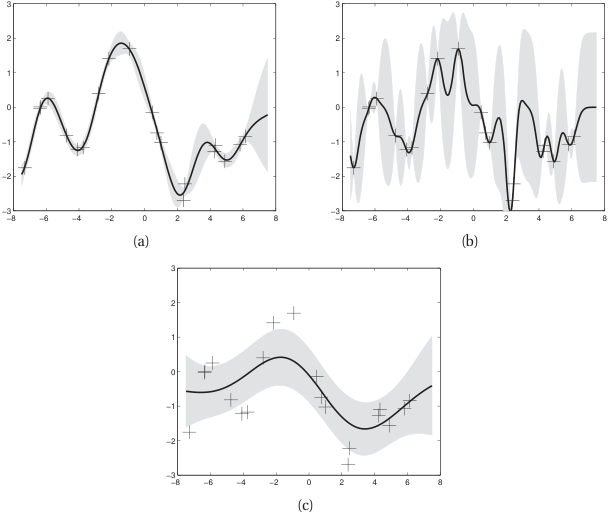
Length scale effect
- Short \(\ell\): wiggly functions, fits local patterns (and possibly noise).
- Long \(\ell\): smooth functions, captures global trends (may miss local structure).
- Optimal \(\ell\): balances data fit and smoothness — determined by marginal likelihood.
- Same 20 noisy training points; three different \(\ell\) choices give very different posteriors.
Length scale effect: prior and posterior samples
Short \(\ell = 0.1\)
Prior

Short \(\ell = 0.1\)
Posterior

Long \(\ell = 5\)
Prior

Long \(\ell = 5\)
Posterior

- Top: prior samples. Bottom: posterior samples on the same data.
- Short \(\ell\): function values decorrelate within tiny gaps → wiggly draws, bands re-inflate between every pair of points.
- Long \(\ell\): strong long-range correlation → smooth draws, narrow bands — confident even far from data (possibly overconfident).
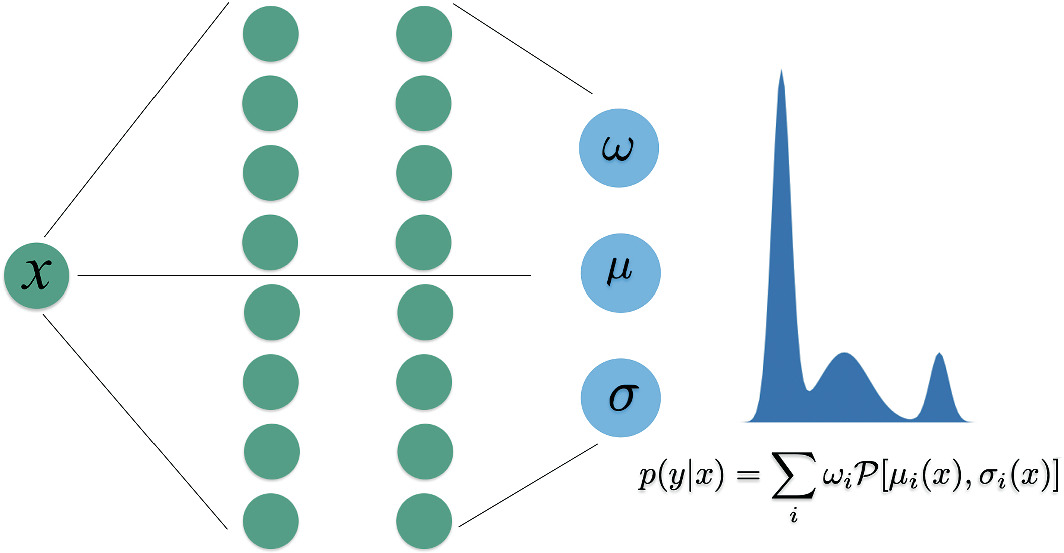
Mixture-Density Networks (MDNs)
- A standard NN outputs a single \(\hat{\mathbf{y}}\) (or \(\hat{y}\)). An MDN outputs parameters of a mixture of Gaussians:
\[ p(\mathbf{y}|\mathbf{x}) = \sum_{k=1}^{K} \pi_k(\mathbf{x}) \, \mathcal{N}(\mathbf{y} | \boldsymbol{\mu}_k(\mathbf{x}), \sigma_k^2(\mathbf{x})) \]
- The network predicts mixing coefficients \(\omega\), means \(\mu\), and variances \(\sigma\) — all functions of input \(\mathbf{x}\) (Neuer et al. 2024).
MC Dropout for uncertainty estimation
- Standard dropout: randomly zero neurons during training.
- MC Dropout: keep dropout active at test time.
- Run \(T\) stochastic forward passes → \(T\) predictions \(\{\hat{y}_1, \dots, \hat{y}_T\}\).
- Mean = prediction. Variance across samples ≈ epistemic uncertainty.
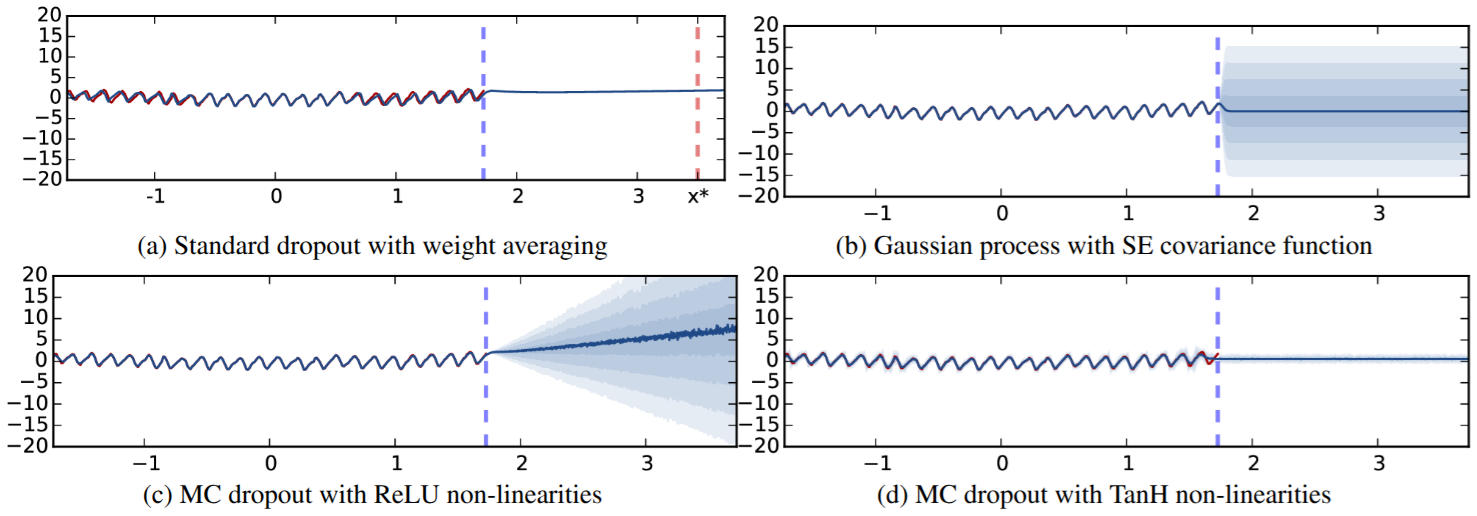
MC Dropout predictive uncertainty on the Mauna Loa CO\(_2\) dataset. Red = predictive mean; shaded = uncertainty band. Standard dropout (a) underestimates; MC Dropout with ReLU (c) grows uncertainty outside training range. (Gal and Ghahramani 2016, fig. 2)
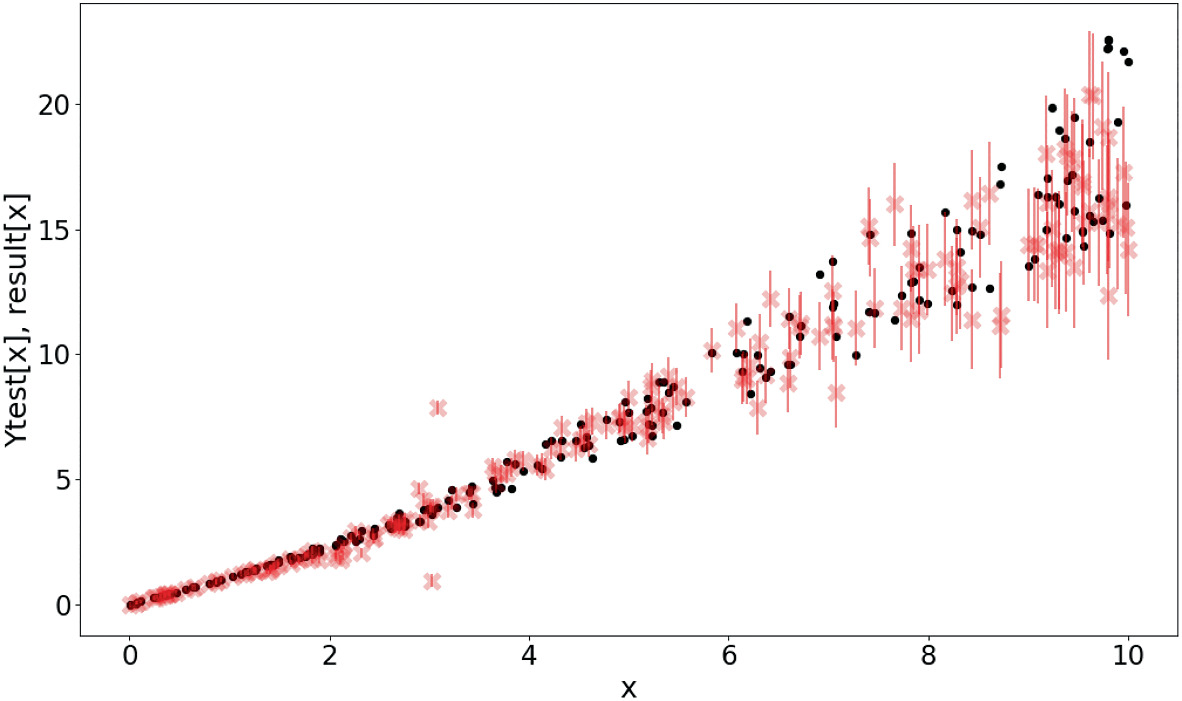
Deep ensembles
- Train \(M\) independent networks (different random initializations, same architecture).
- Each network produces a prediction \(\hat{y}_m\).
- Mean: \(\bar{y} = \frac{1}{M}\sum_m \hat{y}_m\). Variance: \(\frac{1}{M}\sum_m (\hat{y}_m - \bar{y})^2\).
- Empirically produces well-calibrated uncertainties. Cost: \(M\times\) training (Lakshminarayanan et al. 2017).

Results on a toy regression task: x-axis denotes x. On the y-axis, the blue line is the ground truth curve, the red dots are observed noisy training data points and the gray lines correspond to the predicted mean along with three standard deviations. Left most plot corresponds to empirical variance of 5 networks trained using MSE, second plot shows the effect of training using NLL using a single net, third plot shows the additional effect of adversarial training, and final plot shows the effect of using an ensemble of 5 networks respectively. (Lakshminarayanan et al. 2017, fig. 1)
Stochastic enrichment
- Add noise to inputs during prediction: \(\tilde{\mathbf{x}} = \mathbf{x} + \boldsymbol{\epsilon}\), \(\boldsymbol{\epsilon} \sim \mathcal{N}(\mathbf{0}, \boldsymbol{\Sigma}_\epsilon)\).
- Run multiple predictions with different noise realizations.
- High variance across perturbed predictions = model is sensitive = high uncertainty.
- Matches real-world measurement noise propagation (Neuer et al. 2024).
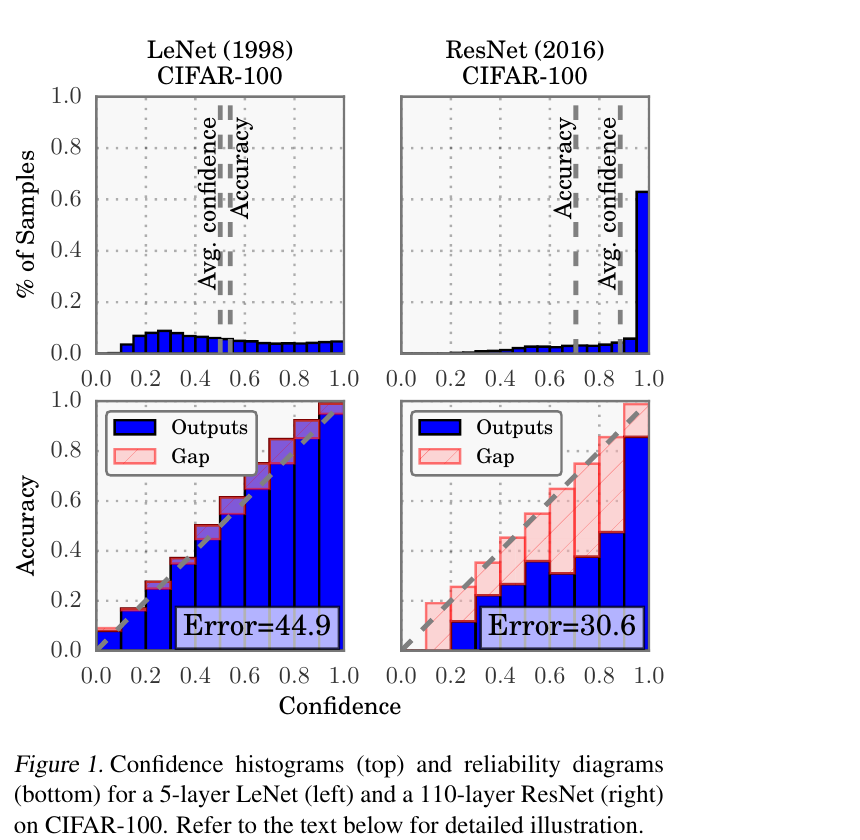
Calibration: are uncertainties trustworthy? (recall Unit 7)
- A model is well-calibrated if predicted \(p\)% confidence intervals contain \(p\)% of test points.
- Calibration plot: predicted confidence level vs observed coverage.
- Perfect calibration = diagonal line.
- Overconfident: intervals too narrow (common in NNs). Underconfident: intervals too wide.
- Modern deep NNs are systematically overconfident — confidence exceeds accuracy (Guo et al. 2017).
Materials example: GP for composition-property mapping
- GP regression from alloy composition (5 features) to yield strength.
- 50 training samples from expensive tensile tests.
- GP provides uncertainty bands → compositions with high uncertainty are targets for next experiments.
- Active learning with GP uncertainty reduces required experiments by 40%.

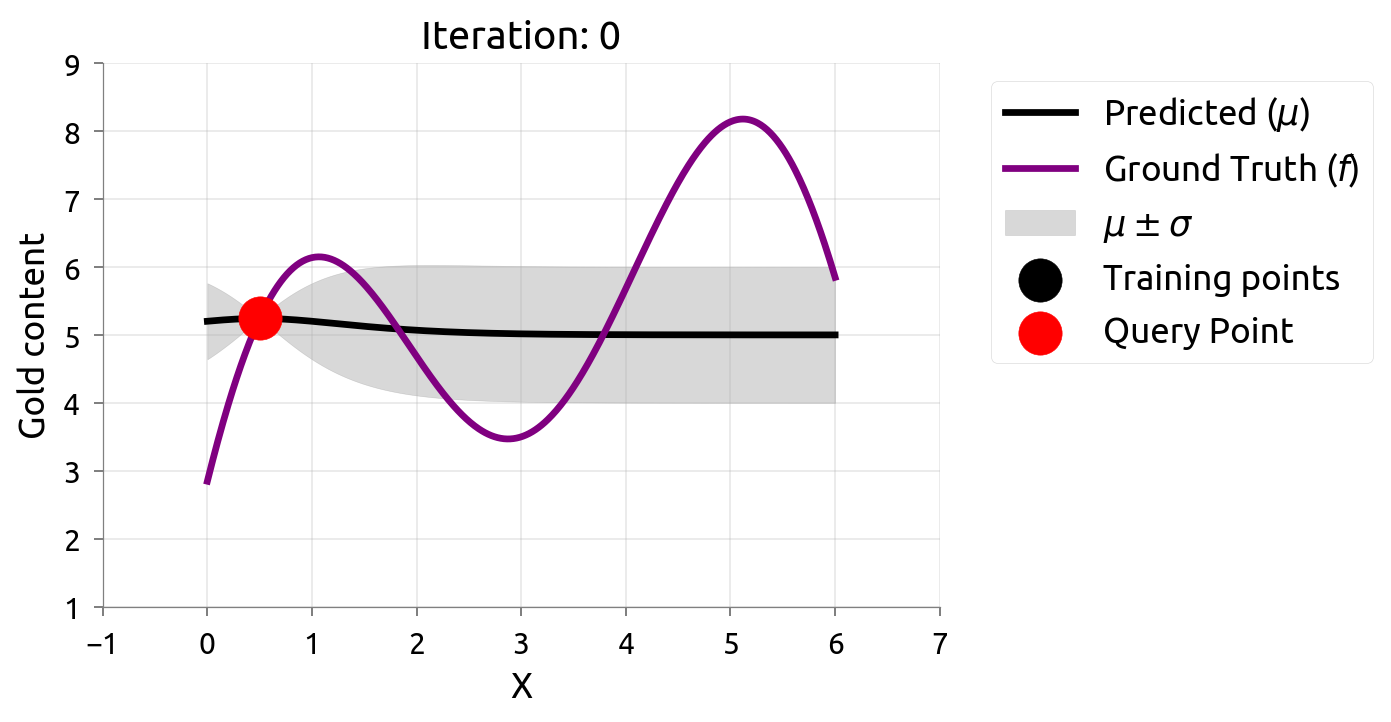
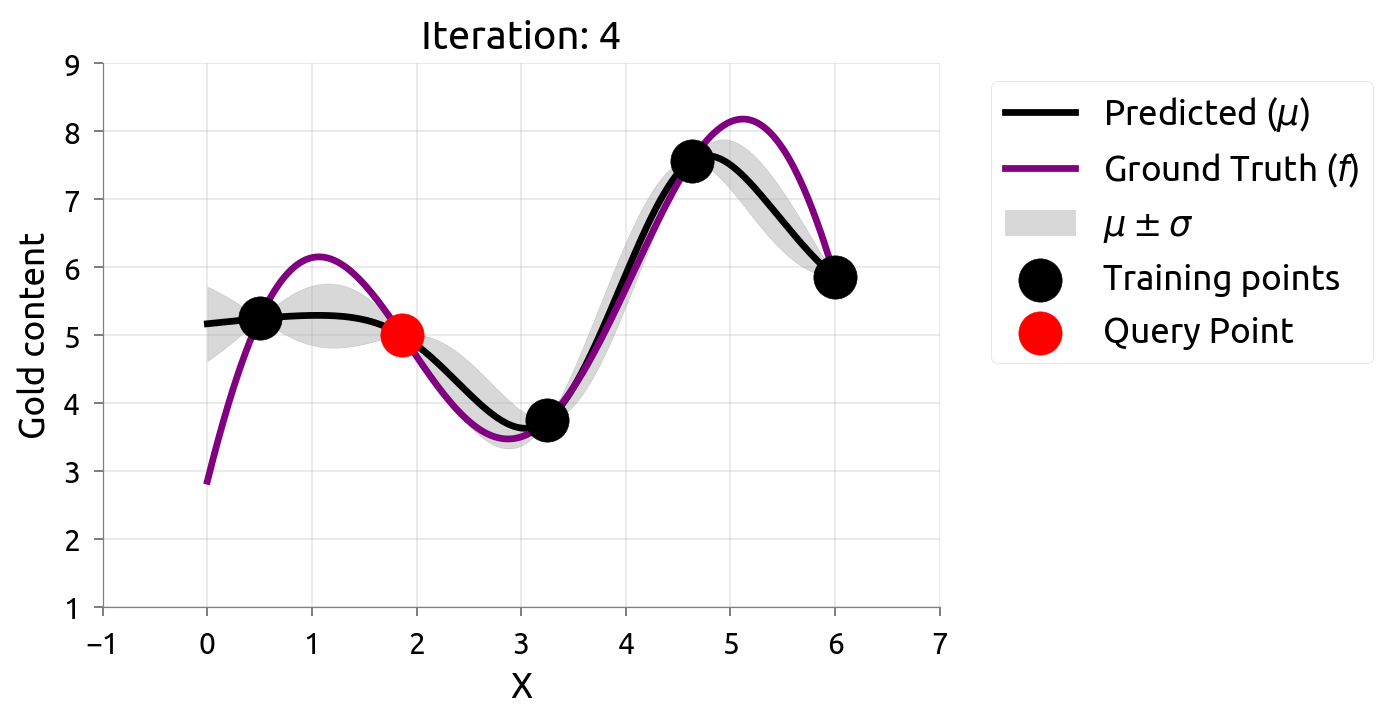
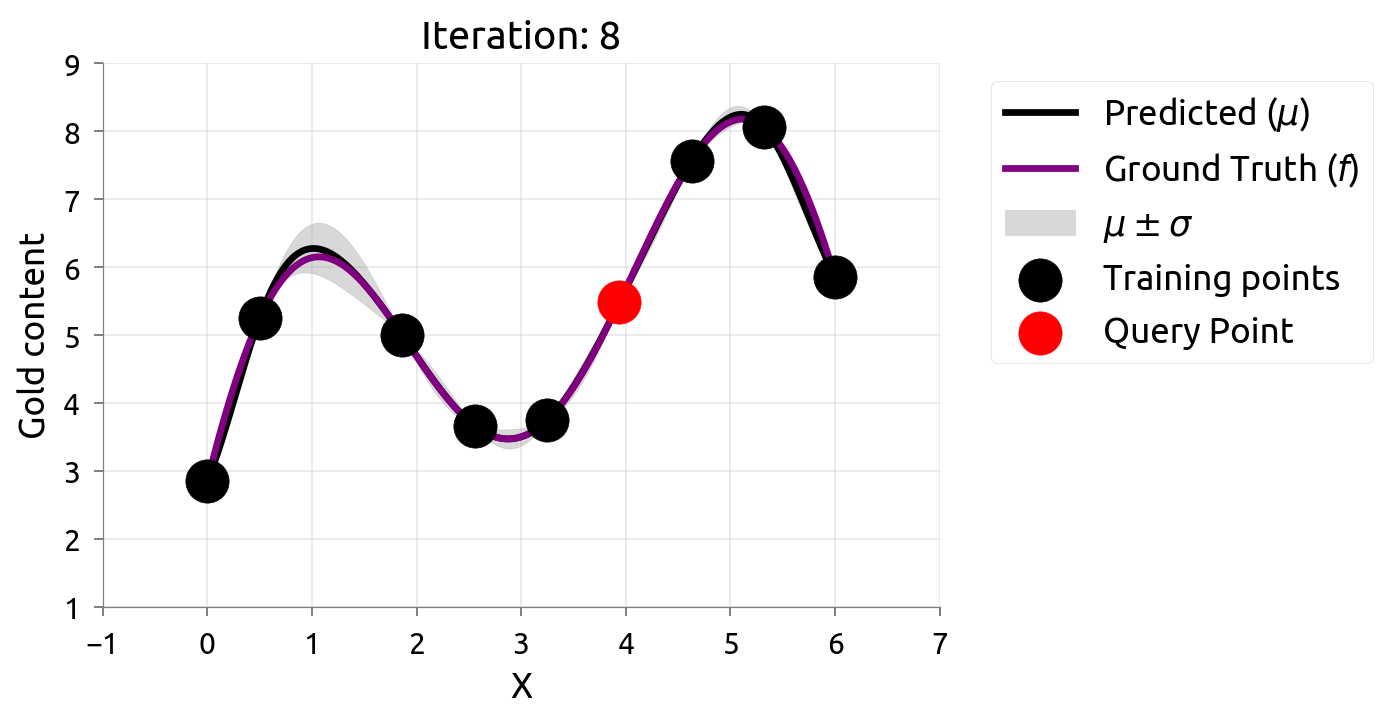
Materials example: active learning with GP uncertainty
- Goal: map the composition-property landscape with minimum experiments.
- Strategy: train GP, identify input with highest posterior variance, synthesize and test it.
- Iterate: retrain GP, select next experiment, repeat.
- This uncertainty-driven loop is active learning — the goal is an accurate map of the whole function.